Le marcheur
The walker
From Robin Lake
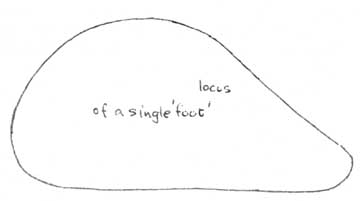
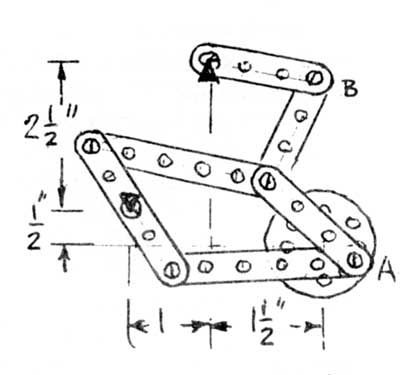
Dans le numéro de novembre 1984 de "The Meccanoman's Newsmag" était paru le schéma ci-dessous permettant de donner à un "pied" une trajectoire assez réaliste : la partie de trajectoire où le pied est en bas est rectiligne et aucun effort de levage n'est plus nécessaire pendant le déplacement horizontal.
In the November 1984 issue of "The Meccanoman's Newsmag" was the diagram below on the left allowing to give to a "foot" a rather realistic trajectory : the part of trajectory where the foot is in bottom is rectilinear and no lift effort is necessary during horizontal displacement.
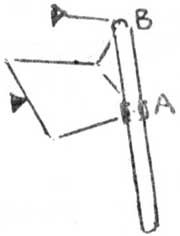
Les points A et B correspondent aux liaisons avec la jambe : un pivot en B et une glissière en A.
Points A and B correspond to the connections with the leg : a pivot in B and a slide in A.
Aussitôt vu, aussitôt construit !
Built as soon as seen !
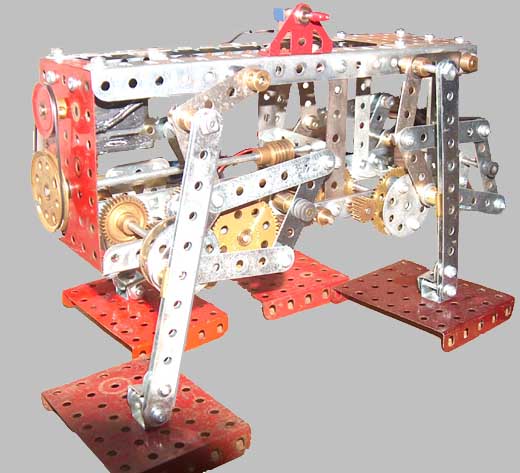
On retrouve la cinématique du schéma, la jambe étant guidée en translation par une bague d'arrêt à glissière n° 50.
Les 4 jambes sont mues par le même arbre, chacune étant correctement déphasée (arrière droit et avant gauche en même temps)
We see the kinematics of the diagram (reversed on the picture), the leg being guided in translation by a slide n° 50. The 4 legs are driven by the samerod, each one being out of phase (back right and front left at the same time)

- Clics : 2267